











台灣近年來的交通事故頻率年年攀升,根據交通部的統計,台灣平均每天會有8人死於交通事故,其中又以老齡人口的比例最高。然而,日常生活中難以完全避開馬路,現今闖紅燈的違規情形屢見不鮮,進而有馬路如虎口的說法來強調路口的危險。這個現象已是刻不容緩的問題,考量政府對於行人的安全一直沒有完善的處理措施,再加上台灣早已成為老齡化和少子化的社會,甚至即將步入超高齡社會,未來對於老年人的照護,以及人力資源的需求將持續加劇,因此希望以智慧機器人來彌補未來人力不足的問題。本文將介紹以「降低馬路交通事故」為宗旨,所設計之能夠協助行人過馬路的交通糾察機器人ESCORTER,目標是讓每位行人能夠安心且安全的過馬路,實現交通友善的環境。
ESCORTER交通糾察機器人是為了在這個低頭族盛行、交通事故頻繁的時代,增加行人對於路口通知的警示性而設計,設置於學區、醫院附近時,可協助行人更加安全地通過馬路。產品設計利用Raspberry pi透過羅技攝影鏡頭對周圍環境進行物件辨識,再由HT32F52352主控板接收指令後控制直流馬達,達到行走的功能,並藉由伺服馬達控制扇子的開與收,達到警示汽機車的目的。產品設計透過紅外線感測器進行循線檢測,並以超音波感測器進行障礙物偵測,七段顯示器則顯示紅綠燈倒數秒數並配合蜂鳴器,用來提醒行人現在的交通狀況。
ESCORTER的目的是維護行人們的安全,在不影響行人的情況下,交通糾察機器人ESCORTER能完成辨識交通號誌的燈號顏色、警示汽機車以及提醒行人交通號誌秒數等任務。ESCORTER創新設計整合多項功能,成為改善交通環境的最佳助手。
運作原理
整個系統具備物件辨識、循線、避障、提醒行人及警示汽機車的功能,各功能的原理詳述如下。
物件辨識
Raspberry pi以羅技c310攝影鏡頭進行影像辨識,透過Yolov5的程式系統,來辨識交通號誌的燈號顏色。
循線
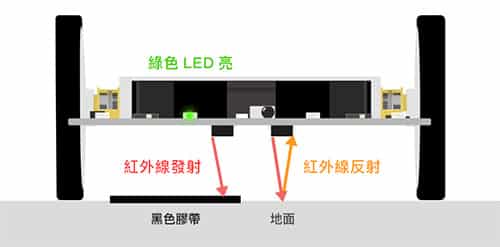
透過紅外線感測器發射紅外線訊號至地面軌道,經由紅外線受光電晶體感應反射光的強弱並且轉換成電壓值,其中黑色的反光率最低,白色的反光率最高。經由微控制器比較並修正自走車的行進方向,使自走車能自動運行在軌道上,如圖1所示。
避障
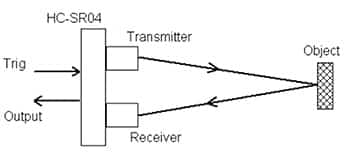
超音波感測器(HC-SR04)由超音波的發射器(Transmitter)、接收器(Receiver)和控制電路所組成,經由計算發射後到接收的時間差來換算出與障礙物的距離,如圖2所示。
提醒行人
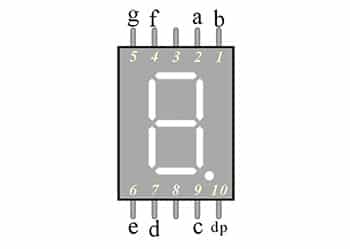
HT32F52352主控板透過GPIO將倒數秒數的資訊傳送給七段顯示器及蜂鳴器,七段顯示器及蜂鳴器收到指令後,將顯示秒數、發出聲響。圖3為七段顯示器的接腳圖,結合圖4七段顯示器的運作方式完成顯示倒數秒數的功能。

警示
使用12V充電電池驅動伺服馬達,成為打開扇子的旋轉動力,並經由HT32F52352主控板控制順逆轉,來達到展開和收起的功能。扇子上架設LED燈泡,透過發光的LED燈泡來達到警示汽機車的功能。
Holtek MCU主要核心功能
產品設計使用HT32F52352主控板,主要用於連接各個元件並以程式控制,連結方式為GPIO,於表1詳述。

產品設計結構
圖5為系統架構圖,詳述如下:攝影鏡頭將影像傳輸給Raspberry pi,而Raspberry pi、超音波感測器以及紅外線感測器皆利用GPIO的傳輸方式傳輸給HT32F52352主控板,主控板收到指令後再利用GPIO傳輸給蜂鳴器、L298N驅動模組以及七段顯示器,最後整合出交通糾察機器人ESCORTER(圖6)。
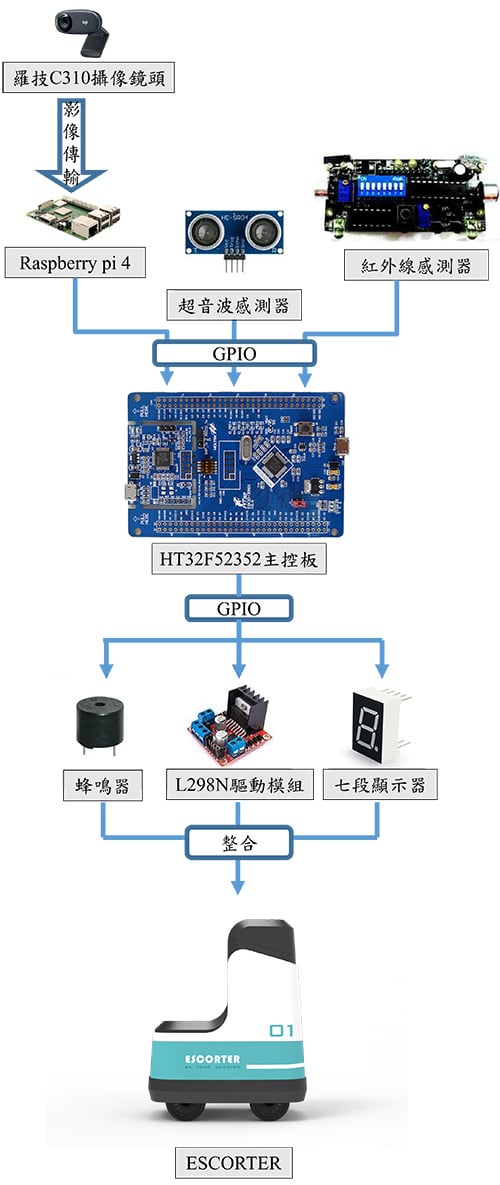

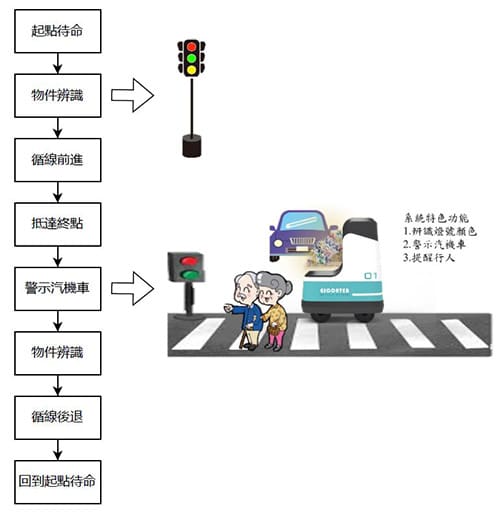
圖7為ESCORTER進行任務的流程圖,一開始將在起點待命,辨識到綠燈後循線前進到終點,接著展開扇子以警示汽機車,辨識到黃燈後則會收起扇子並循線後退回到起點待命。另外,辨識到綠燈後,同時也會顯示綠燈的倒數秒數,在秒數剩2秒時發出聲響,以提醒行人目前的交通狀況。
各功能之流程圖
圖8為物件辨識流程圖,開啟攝影鏡頭後,ESCORTER將開始對前方進行即時的目標檢測。辨識到交通號誌時,透過將交通號誌設為感興趣區域(ROI),並針對ROI區域進行燈號顏色的判斷,達到辨識交通號誌燈號顏色的功能。
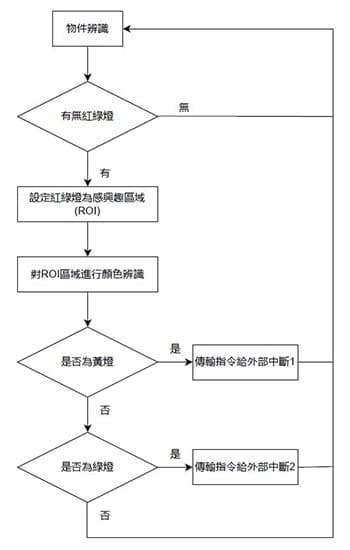
圖9為顏色辨識的流程圖,針對感興趣區域(ROI)影像轉成hsv影像,設定黃色和綠色的hsv顏色數值,過濾出系統需要的黃色和綠色。過濾後的影像為二值化影像,此時黃色和綠色的區域皆轉為灰色,而其他顏色的區域則轉為黑色,再透過消除雜點和膨脹使過濾後的二值化影像更加清晰,最後再對二值化影像進行面積比較,比較黃色轉為灰色的區域和綠色轉為灰色的區域何者較大,進而判斷出是黃色還是綠色。
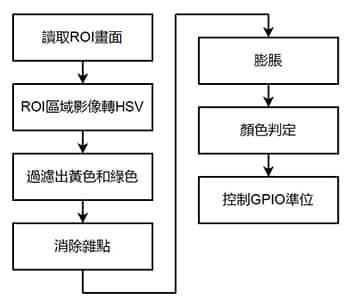
圖10為避障功能的流程圖,當ESCORTER與物體之間的距離小於設定之臨界值,ESCORTER將會停下,避免撞擊到前方的障礙物。
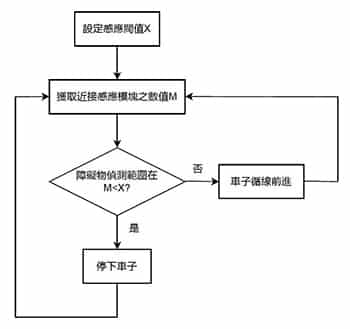
圖11為外部中斷1(表2)流程圖,當辨識到黃燈時,啟動中斷1的指令,使ESCORTER收起扇子後,循線回到起點待命。
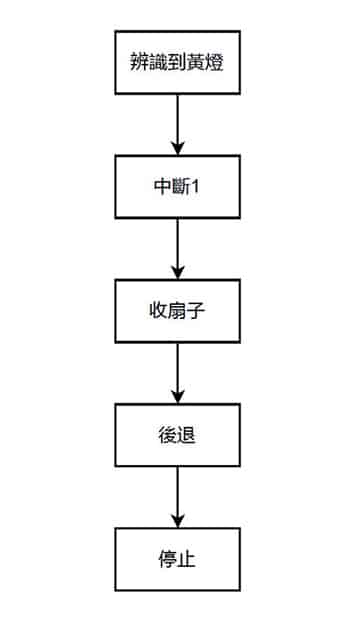

圖12為外部中斷2流程圖,在辨識到綠燈時,啟動中斷2的指令,使ESCORTER能夠循線前進並同時顯示綠燈倒數秒數,設定為倒數9秒。之後將開始進行前方障礙物的偵測,當前方有障礙物時,ESCORTER會停下並持續進行偵測;若前方沒有障礙物,則偵測是否到達終點線。偵測到已抵達終點線時,ESCORTER會停下並展開扇子,藉此警示汽機車,並在倒數秒數剩2秒時發出聲響,藉此提醒行人所剩秒數不多,必須盡快通行;當倒數秒數為0時,將停止發出聲響,若沒有偵測到終點線則繼續循線前進。
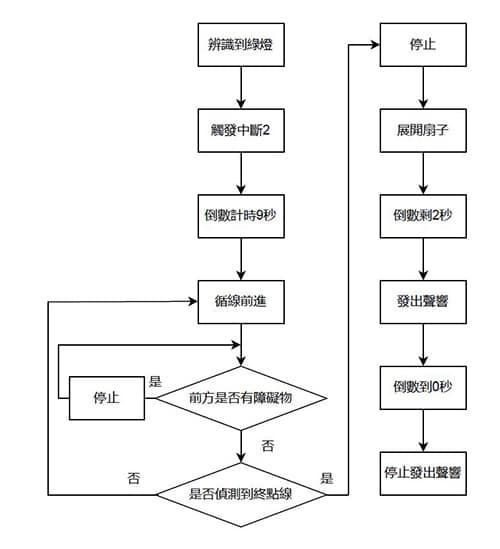
圖13標示為紅外線感測器上的5個感測器。
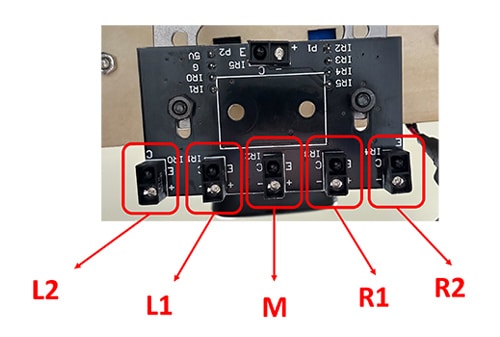
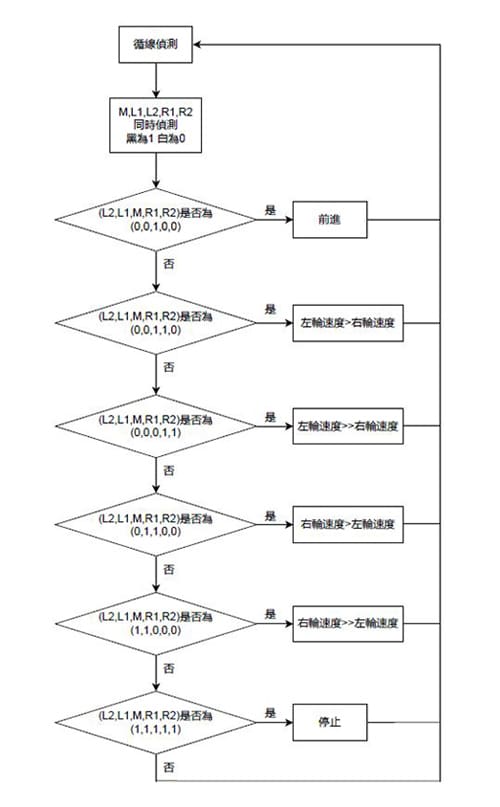
圖14為循線流程圖,開啟循線偵測的功能時,紅外線感測器上的5個感測器會開始進行偵測。設定偵測到黑色的數據為1,白色為0,當只有中間M偵測到黑色,表示機器人目前行駛在正確的路線上,因此讓機器人繼續循線前進;當R1感測器也偵測到黑色,表示機器人車頭目前稍微偏向左邊,因此讓左輪速度加快;當R1和R2兩個感測器都偵測到黑色,表示機器人車頭目前嚴重偏向左邊,因此讓左輪速度遠大於右輪速度;當L1和M偵測到黑色,表示機器人車頭目前稍微偏向右邊,因此讓右輪速度加快;當L1和L2兩個感測器都偵測到黑色,表示機器人車頭目前嚴重偏向右邊,因此讓右輪速度遠大於左輪速度; 當5個感測器都偵測到黑色,表示機器人已抵達終點線,因此讓機器人停下,反之則繼續循線偵測。有了循線偵測功能,ESCORTER能夠依照事先舖設好的黑色軌道線進行移動。
測試方法
物件辨識
事先將程式燒錄在Raspberry pi上,燒錄完畢IP位址即固定,每次皆須連接固定網路(手機熱點分享),進行以下測試:
Step 1:事先準備好紅綠燈模型以及斑馬線海報以模擬馬路環境,並使用羅技攝影鏡頭對紅綠燈模型進行辨識,藉此得到辨識出的物件資訊。
Step 2:將得到的物件資訊顯示在終端(Terminal)上,以確認偵測到的物件資訊是否正確。
Step 3:以GPIO連接HT32F52352主控板與Raspberry pi,將得到的資訊傳輸給主控板,確認主控板是否成功執行指令。
循線
模擬斑馬線,事先在地面鋪設好黑色軌道直線,進行以下測試:
Step 1:以紅外線感測器量測黑線與地板,得到相應的數值。
Step 2:配置紅外線感測器與L298N驅動模組,撰寫程式。當左側感測器偵測到黑色的數量大於右邊時,控制右側馬達加速,反之則左側加速。
Step 3:測試穩定度。
避障
模擬斑馬線上有行人的情形,進行以下測試:
Step 1:配置超音波感測器與L298N驅動模組,設定臨界值,撰寫程式,當偵測到的距離過近時,控制馬達停止轉動使車子停下。
Step 2:測試不同臨界值,取得最合適的臨界值。
Step 3:測試穩定度。
扇子開合幅度與擺放位子的校正
以下為校正的步驟:
Step 1:以12V充電電池供電給伺服馬達,使馬達操縱扇子的開合,確認扇子能夠成功展開與收起。
Step 2:調整馬達的轉彎幅度,使扇子能達到最適當的展開幅度。
Step 3:調整扇子的擺放位子,確認扇子完全展開後,不會使車子往後傾倒。
Step 4:測試穩定度。
測試結果
圖15為ESCORTER開啟攝影鏡頭後的畫面,透過Yolov5的程式系統對物件進行即時辨識及分類,因此可以得到物件的種類,如畫面上顯示紅綠燈的結果,而畫面上的數字則代表辨識的準確度。
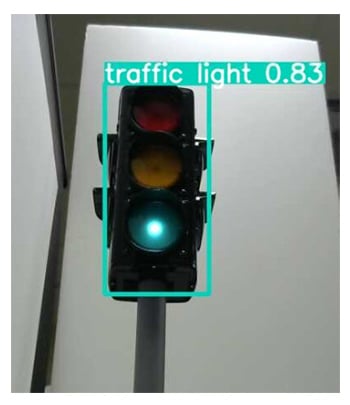
圖16為ESCORTER遇到綠燈的實際運作情形,當系統辨識到綠燈時,ESCORTER 會循線前進到終點並展開扇子。
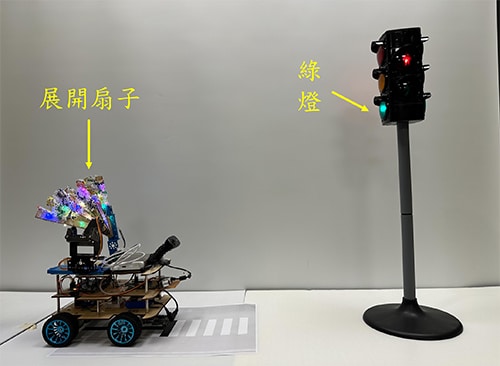
圖17為ESCORTER顯示倒數秒數的實際運作情形,當系統辨識到綠燈時,系統會將倒數秒數顯示於七段顯示器,供用路人觀看。
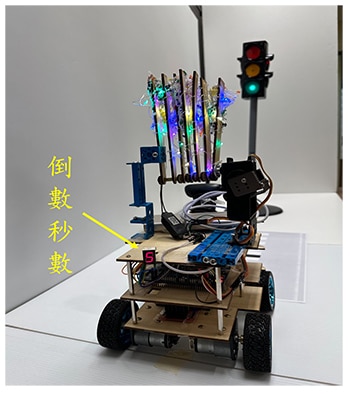
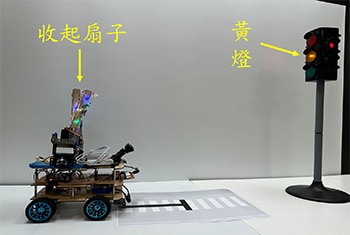
圖18為ESCORTER遇到黃燈的實際運作情形,當系統辨識到黃燈時,系統會將扇子收起,並循線後退到起點待命。
多項功能實現交通安全
ESCORTER交通糾察機器人以HT32F52352為核心主控板,藉由GPIO連接超音波感測器、紅外線感測器、七段顯示器、蜂鳴器以及L298N驅動模組,來達到避障、循線以及提醒用路人當下交通狀況的功能。另外,產品設計利用Yolov5的程式系統來達成即時目標檢測,在辨識到交通號誌時,設定出感興趣區域(ROI),再針對ROI區域進行顏色辨識,使機器人能夠有辨識燈號的能力。
總體而言,ESCORTER整合多項實用功能,外觀設計也相當新穎,容易在路上引起注目,減少交通事故的發生,是改善目前台灣交通環境的優秀助手。
(本文作者廖裕評為中原大學電機工程教授;施昌甫為商業設計系產品設計組教授;黃浩宇/李泯瑋/張碩珉/徐丞毅/賴宥綸為上述兩系學生)