











製造和服務業對自動化程度的需求不斷增加,推動了人形機器人的開發。人形裝置變得更加複雜和精確,其對周圍環境的自由度(DOF)更高,反應時間更短,以更好地模仿人的移動。擁有更高的DOF代表人形機器人需要更多電動馬達驅動器。機器人設計中的驅動器位置定義了驅動器的不同要求。
雖然有協作機器人和工業機器人的標準,但目前還沒有定義人形機器人功能安全要求的標準。預期未來標準組織會隨著需求持續增加,規定人形機器人的安全要求。在定義安全要求之前,人形裝置設計人員必須對目前的系統設計進行盡職調查,以將未來的重新設計工作降到最低。
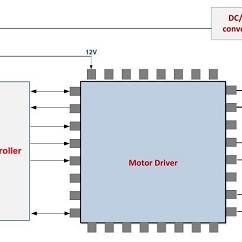
由於機器人中驅動器的位置,最佳化與所有驅動器的通訊,同時最大限度地減少布線量非常重要。實現最佳化的選項很多;最常用的方法是菊輪鍊通訊和線性匯流排拓撲。選擇拓撲結構後,要獲得足夠的驅動器響應時間,請考慮頻寬,時序和延遲要求。
人形機器人的動作必須接收馬達位置資料,以定義路徑規劃。位置資料可讓人形機器人以受控方式移動。為了實現高精確度的受控移動,機器人必須配備轉子位置感測器以擷取馬達上的資訊,並能透過馬達驅動器有效率地將資訊傳送至中央處理電腦。
由於人形機器人是由電池供電,因此馬達驅動器的設計可將效率最大化,以延長機器人的運作時間範圍。在使用高功率位準時,人形機器人可整合PMSM馬達等馬達。有刷DC馬達可用於部分低功耗情況,例如手動和手指控制。然而,目前的設計趨勢顯示未來所有馬達都將採用無刷設計。
選擇馬達類型後,使用者決定如何控制馬達的方法。雖然馬達控制通常與所示相似,但實作控制迴路有多個選項,其中顯示所需的類比子系統和處理器周邊設備。
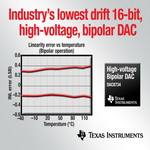
根據機器人的驅動位置,功率水平在4kW至10W之間變化,大多數驅動器介於10W和1.5kW之間。驅動器通常在低於60V的SELV電壓範圍內運作。因此,元件必須在高達60V電壓下運作。為降低放大器、FET及閘極驅動器系統中潛在雜訊的影響,以高達100V運作的元件為佳。
在評估功率級需求和選擇適當電流感測零件以達到所需性能等級時,電流感測也是重要的設計考量。選擇可簡化功能安全認證的裝置非常重要。未來的設計必須考量至少CAT3個PLd安全考量。
在系統設計中,採用TI元件的解決方案建議可使用多種元件,以實現高效能的馬達控制系統。