











近年綠能意識抬頭,帶動綠能產業持續成長。電動車(EV)被視為未來綠能交通的重要一環,銷量也逐年上升。根據市場數據顯示,電動車市場的年均成長率達到25%,預計到2030年全球電動車數量將突破2億輛,如圖1所示。

隨著電動車銷量快速上升,充電樁的供應卻遠遠不足,充電樁與電動車的比例依然維持在1:10,這使得充電樁逐漸成為車主選擇停車位置的考量之一。然而,駕駛者不可能隨時移動車輛,導致許多充電停車格被長期地占據,加劇了充電樁供應不足的問題,過度充電導致起火的情況也層出不窮,這些問題都嚴重影響了電動車的普及與便利性。
為了解決充電樁不足以及過熱的問題,本文試著提出一個解決方案—可以移動的充電樁機器人。移動式充電樁機器人讓駕駛者不必特地尋找具有充電樁的車位,停在一般車位就能進行充電,解決了充電停車格被長期占用的問題。此外,機器人配備智慧監測系統,能夠監控充電過程並防止過度充電,降低過熱及火災風險。
這種設計不僅提升充電的便利性,也增加了充電樁的使用效率。對於停車場運營商和電動車車主而言,這款充電樁機器人有顯著的商業吸引力,它解決了充電設施不足的問題,還為電動車充電帶來了靈活、安全的解決方案,滿足市場對於高效充電設備日益成長的需求。
本充電樁的五大特色功能,如圖2所示。
充電樁機器人的運作原理
本文以盛群HT32F52352微控制器為核心,以實現充電樁機器人的自主移動和監控功能。充電樁機器人使用太陽能板收集環境中的能量,並將其儲存至內部的電池中,同時,充電樁機器人會自行移動到電動車旁為其充電。
機器人內部的光感測模組和溫濕度偵測模組會監控周圍環境的變化,當環境不利於充電(例如光照不足或天氣惡劣)時,微控制器將控制機器人自行移動到合適的位置待機,以保持能量的最佳利用。此外,當偵測到異常溫度變化時,系統會透過連接的設備通知用戶,以避免危險發生。
系統功能與硬體結構介紹
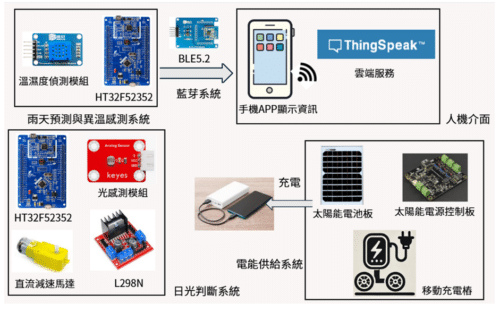
本文內含多種系統,如圖3所示,包括電能供給系統,負責提供太陽能源為車輛充電。日光判斷系統會自動感測光照度判斷目前天氣是否適合充電,若充電效率過低則返回待機,並等待下次適合外出充電的時機。雨天預測系統將開發板加入AI迴歸分析模型,搭配溫溼度感測模組,可以預判接下來是否下雨。異溫感測系統則是利用溫溼度感測模組,檢測機器人充電的當下是否有溫度異常問題,並立即回報車主。BLE藍牙模組負責將感測器偵測數據資料、以及降雨機率的預測結果傳輸至手機APP和人機介面,數據結果會完整展示於手機APP與雲端系統THINGSPEAK。
以下介紹硬體裝置及功能用途:
盛群HT32F52352開發板
本文利用盛群HT32F52352開發板,透過接收溫濕度偵測模組感測之數據進行AI預測是否下雨,並將資訊透過藍牙BLE5.2傳送至手機。
溫濕度偵測模組
本文利用數位型溫濕度偵測模組,偵測周圍異常溫度及濕度,並利用杜邦線連結HT32F52352及模組,以此感測周遭環境之溫濕度數據。
光感測模組
本文另使用簡易型光敏電阻感測器監測周圍環境光強度,判斷是否適合進行充電。一旦光強度低於理想臨界值,機器人會自動回到待機位置;當光強度高於理想臨界值時,再外出充電,以達到即時監控環境及高機動性的成果。
直流減速馬達與L298N馬達驅動模組
本文使用TT直流減速馬達,可以降低馬達轉速並提高馬達轉動力矩,提供自走車轉動動力,使小車移動。再搭配兩個L298N馬達驅動板,控制四個直流減速馬達,並根據HT32F52352傳送的訊號來控制馬達轉動速度,再透過馬達轉動方向的差異,驅使小車前進、後退。
麥克納姆輪
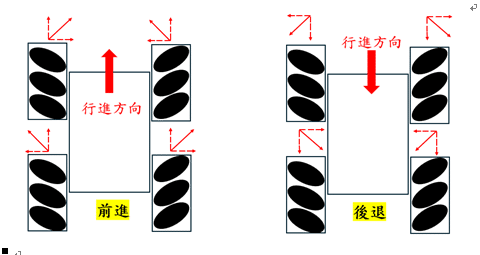
本文採用四顆麥克納姆輪,使充電樁可前後移動。輪子周圍另鑲有多顆與中心呈45度角的小滾輪,使車輛在前進和後退時可以保持穩定。每顆輪子各自由一顆直流減速馬達控制轉速及方向,實現充電樁在不同方向間自由移動。所有輪子朝同一方向旋轉時,其合力方向總和可實現機器人的前進或後退,可見圖4所示。
日光判斷系統與電源控制
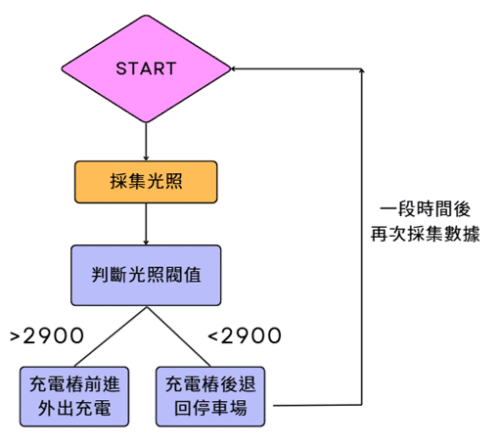
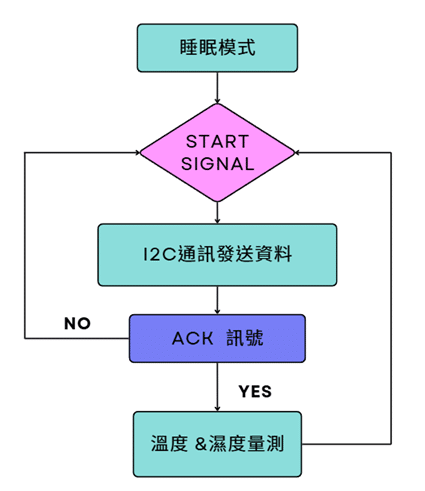
本文使用光感測模組檢測周圍環境光照度,並將結果回傳至微控制器,判斷目前的太陽光照是否達到適合充電的最低臨界值(設定為2900),若有達到,HT32F52352會驅動直流減速馬達轉動,使充電樁移動到戶外進行充電,若低於臨界值則返回室內待機,一段時間後再次出門採集數據,充電樁移動流程,如圖5所示。
本文所採用的高效單晶太陽能電池板,可作為充電樁充電來源,並使用DFRobot太陽能電源控制板,將充電樁獲得之能量分配給電動車的電池,同時進行電量管理與保護,確保系統在充足電力下運作,防止電池過充或過放電而導致事故的發生。
雨天預測系統
本文將BME33M251溫濕度感測模組與微控制器HT32F52352整合,以預測降雨機率,再利用BME33M251感測器之Data Sheet中提供的I2C通訊方式,將偵測到的溫度與濕度數據傳送至MCU進行處理,主機傳送START訊號後,依序傳輸位址(1011100X,X為讀寫位元1/0)、Function Code(0x03)、Start Address(0x00)、Number of Access Address(0x04),再從主機找取RHH、RHL、TMPH、TMPL四個字節,取得資料後再使用轉換公式計算溫溼度數據(轉換公式為:Temperature=(TMPH×256+TMPL)÷10.0),如圖6所示。
這些數據結合每筆數據取得的時間點將用於構建預測模型,其中溫度(x1)、濕度(x2)和時間(x3)為輸入特徵,降雨機率(y)設為目標值。本文採用了多元線性回歸的方法建構預測模型(模型的方程式為:y=w0+w1x1+w2x2+w3x3+ε),藉此捕捉溫度、濕度、時間與降雨概率之間的關係。
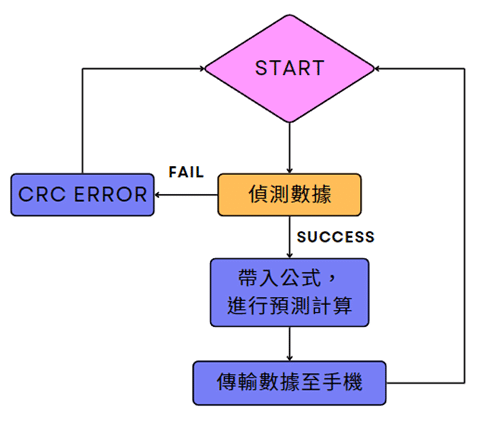
其中w0、w1、w2、w3為回歸係數。訓練過程中使用梯度下降法最小化損失函數,並使用均方誤差(MSE)處理數據,使預測值更接近真實值。再將訓練得到的回歸係數w0、w1、w2、w3直接放進HT32F52352運算,此方式確保模型能夠與HT32F52352的記憶體和計算能力匹配,經由MCU直接輸出預測之結果,實現無需外部協作的獨立運行。同時,感測系統會定期收集環境中的溫度和濕度數據,並將這些數據帶入訓練完成的回歸分析方程式,對降雨機率進行預測,如圖7所示。
BLE藍牙傳輸系統和人機介面
透過連接埠連接HT32F52352開發板、溫溼度感測器與BLE藍牙等模組,再利用藍牙系統與手機連線,將偵測到的資料傳輸到App顯示。初始化Address已鎖定藍牙設備,UUID則用於識別BLE設備中的服務和特徵。為了降低儲存和傳輸的負擔,以及避免在BLE環境中與其他功能混淆,會預先分配常用的UUID值,讓BLE裝置提供對應的服務。
將藍牙接收到的資料進行封包擷取,取得偵測到的溫濕度數據,再將數據放置在App Inventor中的標籤格顯示,結合THINGSPEAK雲端系統,將溫度和溼度資料上傳雲端,並使用App Inventor中的網頁瀏覽器,將記錄下來的數據呈現在手機上。
充電情境測試
為確保日光判斷系統在實際應用的可用性和可靠性,特地針對光感測模組,在室內模擬不同環境光照射之下呈現的光照值測試,經實驗後整理成表1,測試流程如圖8所示。

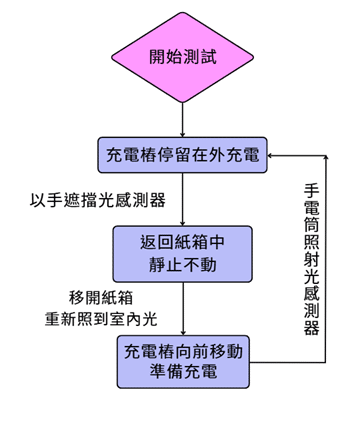
充電樁設定可以進行充電的臨界值為2900,並以手遮擋光感測器,使小車在光照數值低於2900以下時退至紙箱中待機,模擬充電樁返回室內休息的狀態;此時將紙箱移開,光照數值回歸至室內光數值,小車向前移動,模擬充電樁至戶外的情況;最後再以手電筒照射,小車靜止不動,模擬充電樁停留在戶外接受日光充電的情境。充電樁實際硬體架構如圖9所示。
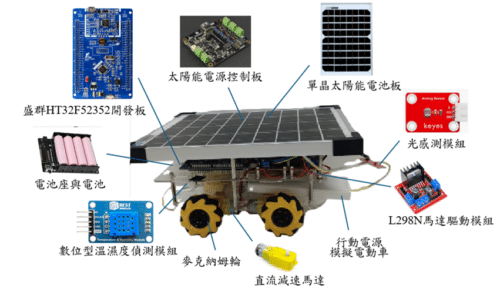
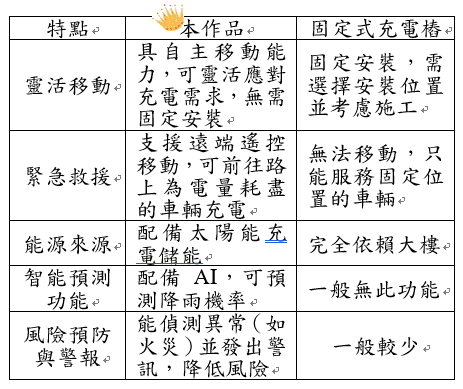
本充電樁與其他產品的比較如表2,盛群元件使用型號及數量詳見表3。

(本文作者廖裕評為中原大學電機工程學系教授,謝名宥、李佳仲就讀於中原大學電機工程學系碩士班)