優化辨識速度與準確率 PerceptIn堅定安全低速自駕之路
自動駕駛技術因為人們對於交通安全的要求與各項新興技術的發展而成為科技產業的顯學,一般用車的自駕化發展,因牽涉到複雜的現實環境,各項要求更加嚴謹因此還停留在研發與測試階段,但是應用於特定環境的自動駕駛載具,可能是載貨或在園區/廠區固定路線上執行單純任務,目前的技術相對游刃有餘。
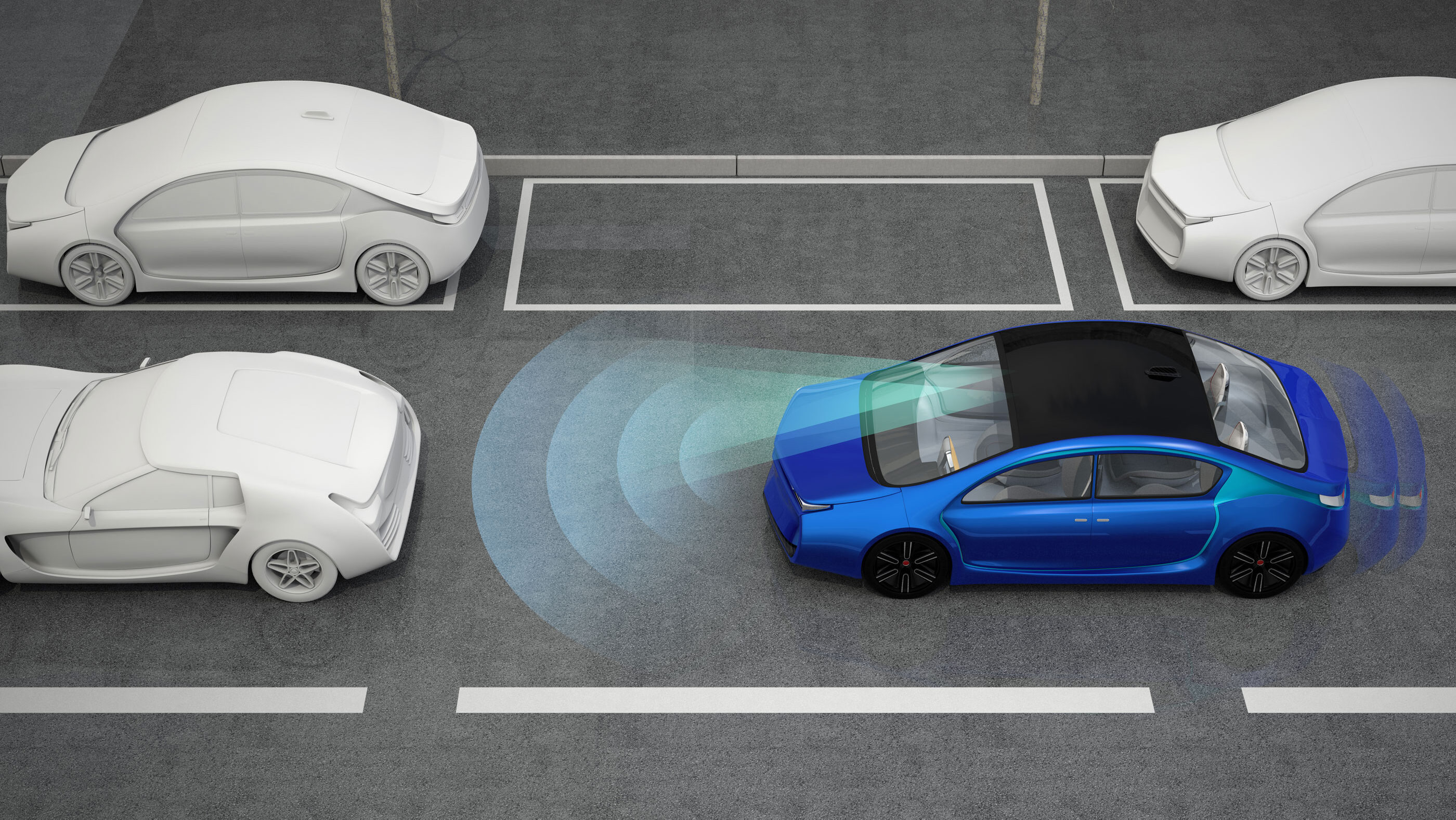
在自動駕駛的各項技術中,負責蒐集環境資訊的感測技術被認為是關鍵之一,發展特殊應用無人載具的普思英察(PerceptIn)商務拓展經理馬羽佳指出,目前自駕車的感測技術主要分為兩類,一種是光達(LiDAR),另一種是電腦視覺(Computer...
》想看更多內容?快來
【免費加入會員】或
【登入會員】,享受更多閱讀文章的權限喔!