









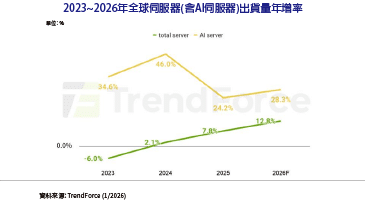




大家好,在這篇教學文中,我將展示如何製作四軸飛行器的機架( Frame )還有控制搖桿( Joystick )。
目前,我尚未完成這款飛行器的軟體,但我正利用閒暇時間,開發這項專案,所以基本上是穩紮穩打、循序漸進。文章的重點,會更著重於硬體層面,而非軟體開發。
專案主要目標,是建構一架功能正常的四軸飛行器,主要使用以下材料和元件:
核心材料
- 3D 列印機:RepRap Prusa i3
- 微控制器:Arduino無線通訊模組:nRF24L01 Wi-Fi 模組 (可從 eBay 以低廉價格購得)。
- 可變電阻:數個 10k 電位器( 6 個旋轉式和 3 個滑動式,可從 eBay 以低廉價格購得)。
- 電源:鋰聚合物電池 ( LiPo Batteries )
動力系統:
- 無刷馬達 (Brushless Motors) 與螺旋槳 ( Propellers )
- 電子變速器 ( ESC ):用於馬達控制。這些 ESC 表現出色,反應迅速,且控制方式與伺服馬達相同(控制範圍 0-179)。
機架材料:
- 15 毫米鋁型材 ( Aluminium Profiles )
可選設備與額外建議:
- 充電器:如果您需要充電器,請記得準備。
- 第一人稱視角系統 ( FPV )
- 發射器:發射器上將配備串列 LCD 螢幕
(編按:所有 CAD 檔案,都可在的原文結尾處找到。原文作者 ivver 是在 Solidworks 2015 版本中繪製這些檔案,如果您想要開啟並編輯這些檔案,請務必留意軟體版本,因為 2014 版本無法開啟、更新版本所建立的檔案。)
步驟一:控制搖桿
我從 eBay 購買的搖桿虛位太大( Airiness ,註一),因此決定自行開發一個零虛位或虛位極小的搖桿。我手邊剛好有幾個 10k 的電位器( Potentiometers ),心想何不自造一個複製品?畢竟它的機械結構相對簡單,且所有零件都在我的桌上。
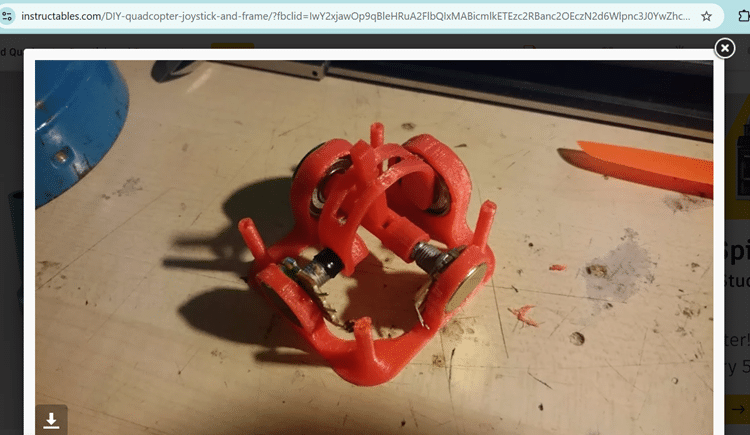
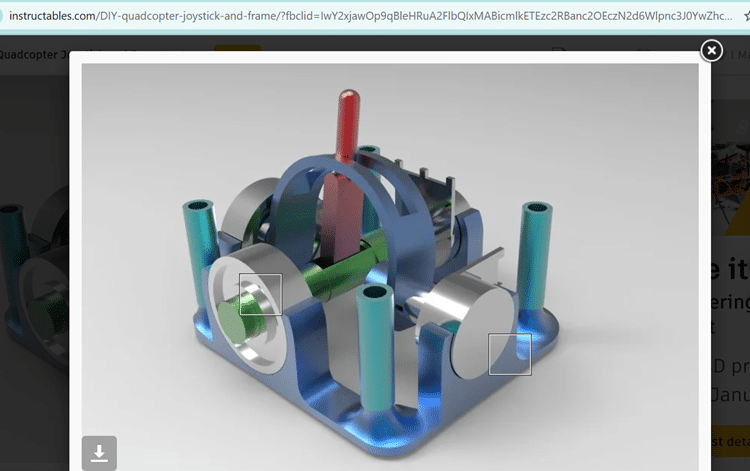
從上方的圖1、圖2中,您可看到搖桿的開發過程:紅色的那是原型( Prototype ),隨後我修改更多細節,並列印出最終成品(藍色)。
列印細節與注意事項
我將間隔管( Spacer Pipes )與底座分開列印,因我的 3D 列印機有些問題。間隔管在單獨列印時,成品效果比直接列印在底座上好得多。
重要提醒: 如果您要列印這款搖桿,請注意我故意將孔洞和凹槽的尺寸,設計得稍大一點,原因是我這台印表機列印出來的尺寸,會比設計尺寸小約 0.5 毫米 ,因此,如果您使用不同精度的列印機,成品可能會有虛位。
步驟二:列印搖桿外殼
這個設計結果相當不錯。我在搖桿外殼上預留足夠空間,可容納:
- 2 個旋轉式電位器( Rotary Potentiometers )
- 4 個開關(Switches )
- 3 個滑動式電位器(Slide Potentiometers )
- 1 個 LCD 螢幕,用於顯示來自四軸飛行器的回饋資訊(如溫度、電量、壓力等)。
我認為,這些元件應足夠用來對四軸飛行器進行一些調整。我其實從未擁有過四軸飛行器,所以到時,我會再看看這些電位器和開關具體會用在哪裡。
步驟三:製作四軸飛行器機架
許多人問我,為什麼不直接列印出包含機臂的完整機架。答案是,我希望自造一款堅固的機架,這樣它在墜機時不容易破損。
這個列印底座( Printed Base )的優點是:您不需任何螺絲,就能將 U 型材(U Profiles)固定在其中。事實上,我是用榔頭敲進去固定的,但如果您需要使用螺絲,我在每個機臂連接處都預留兩個孔位。
這次列印,花費約 6 小時 30 分鐘,時間相當長,但我得到了想要的品質。我另外增加一個有用的東西,用於安裝電子設備或其它零件板塊(Plates),這在未來可能會很有用。
待續:關於軟體的構想
軟體的設想,是利用 Wi-Fi 模組,在兩塊 Arduino Mega 開發板間,建立雙向通訊。這架四軸飛行器,應能承載 FPV 系統、 GoPro ,以及氣壓計( Barometer )、溫度計( Thermometer )等其它感測器。
此外,我還考慮加入一項功能:利用超音波感測器維持恆定高度,該高度應可在 4 米範圍內變化,並通過發射器上的一個電位器設定。但首先,主要目標是利用陀螺儀( Gyroscope ),讓四軸飛行器在空中保持穩定。
程式碼與檔案分享
一旦我開發出程式,就會在這裡發佈,請保持關注。(編按:在原文附件中,您可看到重製此專案所需的所有檔案。如果您需要其它檔案格式,請在原文下方向作者 ivver 留言。)
註一:搖桿虛位 ( Airiness ),在工程和電子學中更常稱為死區( Dead Zone )或機械間隙( Mechanical Play )。它指的是,您移動搖桿或控制桿時,在輸入訊號開始變化前,實際產生的非作用區間或空行程。
(本篇文章是原文作者 ivver ,在 AUTODESK INSTRUCTABLES 網站上的投稿。特別感謝原文作者開放授權,使我們得以進行翻譯,特此致謝!若讀者有興趣閱讀原文,請點擊:原文網址,謝謝!)
(本文轉載自vMaker台灣自造者,原文連結:https://vmaker.tw/archives/76833)