確保引擎與馬達平穩切換 油電車曲柄軸感測器新解
內燃機引擎中的感測器用於混合動力汽車時面臨特殊的挑戰。現今曲柄軸感測器必須區分引擎運轉時的有意旋轉和隨機曲柄軸運動,例如純電動驅動期間由震動引起的曲柄軸運動。這是確保在內燃機引擎和電動馬達之間能平穩切換的方法。唯有如此,才能以最符合成本效益的方式訂定發動機和電池等元件的尺寸,本文介紹曲柄軸感測器中的相應演算法。
全球汽車製造商正在擴展其驅動系統的產品組合。即使展望未來的燃料電池和合成燃料,在內燃機引擎與電動馬達之間仍有許多混和動力的選項。這些選項包括啟停內燃機引擎(在等紅燈時關閉馬達幾秒鐘然後進行冷啟動)到插電式混合動力車(在電池電量不足或車輛在高速公路上高速行駛時,可以在內燃機引擎啟動之前以全電動模式達到時速50公里)等。
即便是最新的啟停系統,市場上也已經有兩種不同的實作方式。在第一種方式中,內燃機引擎會以彷彿已一小時未啟動的狀態再次啟動。在第二種方式中,引擎會在熄火時監測引擎的運動,因此,引擎再次啟動時,車輛已經知道曲柄軸和下一個要點燃的氣缸位置。查看啟動發電機可連接到驅動軸的不同位置,或者離合器將不同馬達連接到驅動軸的點,很快就會發現內燃機引擎曲柄軸元件幾乎有無限多種選擇。
感測器準確感知曲柄軸角度
為了讓大眾儘可能接受新的電力驅動系統,製造商必須以容易操作和可預測、平穩的駕駛體驗,且不能發生任何惹人厭的「驚喜」,才能贏得過往內燃機引擎愛好者的信心。重要的是,內燃機引擎能夠平穩地、幾乎不被察覺地啟動,例如在紅綠燈或塞車時啟停模式的體驗。其中,車輛必須即時知道曲柄軸的角度。
如果車輛因塞車而停止三分鐘,曲柄軸感測器能夠忽略輕微的溫度漂移,或者,最好能進行補償。不過,在崎嶇不平的道路上行駛30分鐘時,曲柄軸在與牽引輪分離時可以自由移動,不過感測器可能會錯誤計算出輪齒的輕微晃動或震動,或者將這些運動解釋為新的有效訊號。為了確保內燃機引擎能夠滑行運作,感測器不能錯誤計算任何經過的輪齒。感測器不可錯過任何齒數、計算任何額外的齒數,或錯誤辨識旋轉方向。
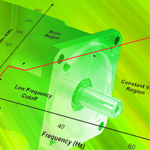
這些標準會在曲柄軸感測器內部分散執行,感測器機殼內基本上會有一塊磁鐵,而這塊磁鐵的磁力線在這些旋轉經過時由輪齒調整。因此,感測器的效能最終是由磁場強度的波動所決定。這些波動取決於許多因素,包括感測器和觸發輪之間的氣隙以及溫度。為了確保不會偏離正題,本文主要著重於與感測器效能相關的機械元件。英飛凌的XENSIV...
》想看更多內容?快來
【免費加入會員】或
【登入會員】,享受更多閱讀文章的權限喔!