













緊密結合設計架構助臂力 INS模組增強GNSS精準度
消費性低價的微機電系統(MEMS)感測器模組,已變成智慧型手機中的主流元件,主要目的係用來改善使用者介面、增加遊戲操作體感和電源管理效率,但對全球導航衛星系統(GNSS)接收機來說,另一項發展重點就是如何利用這些已存在的MEMS感測器模組,進一步增強定位的準確度和可靠度。
強化手機位置功能 GNSS結合INS成風潮
GNSS和MEMS感測器模組結合的重點,已從原始的增強航位推算(Dead Reckoning, DR)用途演進至緊密結合(Tightly Coupled Integration)GNSS接收機,以全面提升位置精確度和可靠度。主要發展方向係利用一個公開應用程序介面(API)讀取原始的MEMS資料,並將此資料和GNSS的量測資料在位置引擎(Position Engine, PE)進行緊密結合。
在所有MEMS感測器模組中,較適合與GNSS結合的是慣性導航感測器(Inertial Navigation Sensor, INS),目前智慧型手機在INS的主流配置為三軸加速度計(Accelerometer)、三軸陀螺儀(Gyroscope)和三軸電子羅盤(eCompass);較新的設計中還會加入一軸的氣壓感測器(Barometer)偵測高度變化(圖1)。
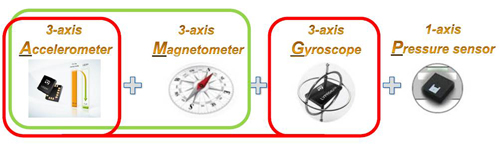 |
| 圖1 十軸INS感測器示意圖 |
一般MEMS感測器封裝模式都是將三軸加速度計和三軸陀螺儀封裝成一個運動感測器模組(Motional Sensor Module),主因是大部分公司皆能同時提供此兩種元件:較新的做法則是透過異業結盟,進一步將電子羅盤和運動感測器模組再組裝成INS模組。
GNSS和INS感測器具有互補效應,INS感測器一般具有短期的精確度但不具有長期的飄移因應能力,須藉由GNSS做校正;而GNSS雖具備長期的穩定性,但在弱訊號區內將發生短期的不精確狀況,須利用INS資料協助量測。
傳統觀念是利用昂貴的車規等級的INS感測器結合GPS接收機,實現無縫接軌的導航,也就是所謂的航位推算功能;但根據實務經驗顯示,該技術尚不成熟,即使採用昂貴的車規級INS模組,功能可靠度也不是很高,因此相關設備市場接受度並不高。
近來隨著MEMS製程演進和低價化使愈來愈多消費性等級的INS感測器被放置在智慧型手機內,雖然消費型等級的INS感測器的準確度和可靠度無法和車規級產品相提並論,但演算法的發展重心正逐漸從原來的航位推算變成位置增強功能,因此廉價的消費性等級INS感測器便已足夠提升GNSS系統性能。
GNSS/INS整合架構分成四個等級
所謂消費性低價化的MEMS感測器模組也意味著較差的感測器性能,因此MEMS感測器模組無法在自主模式(Autonomous Mode)中使用,只能藉由外部的量測(通常都是GNSS接收機)來限制感測器誤差的累積速度。
GNSS接收機和INS感測器依整合複雜度可分為下列四種程度,第一層級為航位推算,當GNSS接收機失去衛星訊號時,可利用INS感測器維持位置更新功能。第二等級是寬鬆結合(Loosely Coupled Integration),INS感測器的量測資料和GNSS接收機的整合,將發生在位置引擎(Position Engine, PE)之後(圖2)。
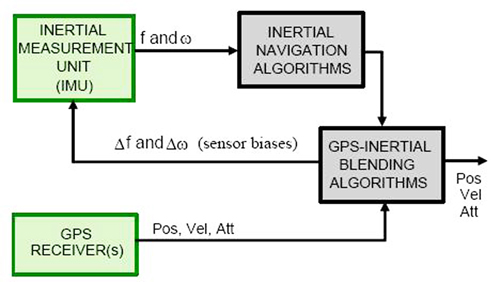 |
| 圖2 GNSS接收機和INS感測器的寬鬆結合架構圖 |
第三和第四等級則分別為緊密結合和超緊密結合,前者INS感測器的量測資料和GNSS接收機的整合將在量測引擎(Measurement Engine, ME)之後,位置引擎之前,如圖3所示為GNSS接收機和INS感測器緊密結合的區塊圖。至於後者的GNSS接收機和INS資料在量測引擎就開始整合(圖4)。
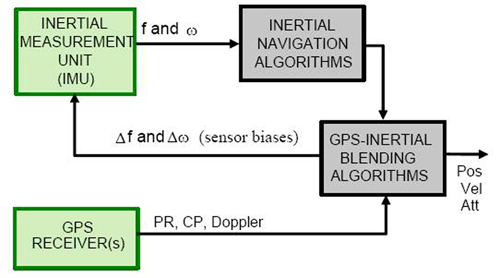 |
| 圖3 GNSS接收機和INS感測器的緊密結合架構圖 |
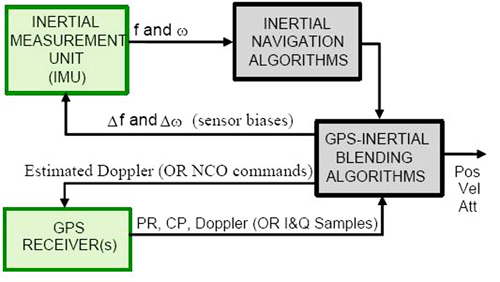 |
| 圖4 GNSS接收機和INS感測器的超緊密結合架構圖 |
對GNSS接收機而言,超緊密結合的架構不僅可增強位置的精確度和可靠度,更能改善GNSS靈敏度並增加對射頻(RF)干擾的抵抗力。在此種結合下,INS感測器直接對GNSS的相位/載波(Phase/Carrier)和碼追蹤迴路(Code Tracking Loop)進行輔助。
另外,超緊密結合GPS/INS接收機可縮短GNSS訊號擷取時間,以及鎖相迴路(PLL)的雜訊抑制能力,因而能提供更準確的都普勒(Doppler)頻率資訊和相位量測;不過,就技術成熟面的角度來看,超緊密結合架構還無法在消費性GNSS接收機上實現。
效能優異/技術成熟 GNSS/INS緊密結合最吸睛
效能優異/技術成熟 GNSS/INS緊密結合最吸睛
目前智慧型手機主流技術採用緊密結合方案,不像寬鬆結合的架構具有定義非常清楚的子系統(例如GNSS和INS子系統)的輸出(例如位置、速度和高度)。在緊密結合的架構中,子系統的輸出並沒有定義非常清楚,故每一家解決方案供應商的做法會有一些差異,但基本原理仍相同。
在GNSS接收機子系統中,一般都是輸出量測引擎所量測到的偽距離(Pseudo Range, PR)和都普勒現象,在INS子系統中會有兩種不同的做法,包括輸出原始資料(如加速度、角速率、高度和方位角)和利用一個外掛的微控制器(MCU)處理過的資料。
透過緊密結合設計方式,可提供比寬鬆結合更精確的位置資訊,因為在此架構中所使用到的GNSS量測資料包含偽距離和都普勒,而這些資料基本上和寬鬆結合所使用的位置、速度和高度的資訊並不緊密相關。再者,緊密結合可提供更靈敏的錯誤偵測和隔離機制,利用此一優勢可將較差衛星的偽距離或都普勒量測在位置引擎中移除或降低權重。
緊密結合還有另一項優勢,只要GNSS量測引擎的資料存在就可連續校正INS感測器。圖5所示為利用GNSS/INS緊密結合在航位角的改善,可發現GPS接收機的航位角錯誤在第95分位(95% Tile)時高達100度,GNSS接收機在相同的第96分位時可降低到50度,因此GNSS比起GPS接收機具有兩倍的航位角精確度。
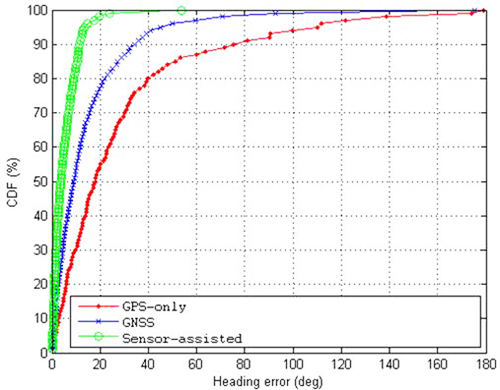 |
| 圖5 利用GNSS/INS緊密結合設計,將顯著改善導航設備的航位角誤差。 |
此外,接收機加入GNSS/INS緊密結合方案後,在第95分位時航位角的錯誤還可低到17度。由於大部分地圖匹配(Map-Matching, MM)的演算法都根據累積的橫向位移誤差、航位角和道路方位角度差,決定所要匹配的道路機率,故航位角降低可大幅改善後端地圖匹配的錯誤率。
緊密結合又可稱為集中化,代表GNSS的量測和INS資料只經過一個卡爾曼濾波器(Kalman Filter, KF)處理。其中,GNSS量測引擎測到的偽距離/都普勒資訊,以及INS感測器擷取的距離和速度差值,都會被輸入到一個閉迴路的組態KF中,輸出INS的偏壓和比例因子誤差狀態(Scale Factor Error State),以校正INS感測器。
KF採閉迴路組態的主要功能除以GNSS的量測資料校正INS外,還可限制INS誤差累積速度。KF可利用校正過的INS感測器資料,偵測量測引擎得到的每一顆衛星偽距離和都普勒值,並根據校正過的INS感測器資料將有問題的衛星的偽距離、都普勒值或兩者,從位置和速度的解算中移除或降低權值,同時用來校正新的INS感測器量測資料。如圖6為緊密結合GNSS/INS系統的具體作法與運作方式。
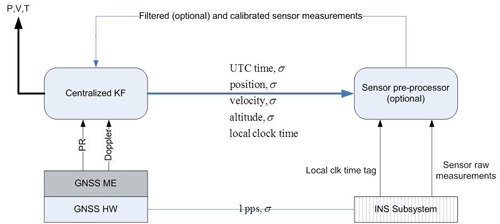 |
| 圖6 GNSS/INS緊密結合方案的訊號處理流程圖 |
晶片大廠競推GNSS/INS緊密結合方案
截至目前為止,不同的GNSS接收機解決方案業者利用不同的架構來實現GNSS/INS的緊密結合,例如博通(Broadcom)的HULA(Universal Hybrid Location API),以及高通(Qualcomm)的ISAGNAV(Inertial Sensor Assisted GNSS Navigation)。每一家業者的GNSS/INS緊密結合系統架構不盡相同,最主要原因在於GNSS接收機架構有所差異,而且也須考量相互侵權的潛在商業問題;但就其產品本身而論,所有解決方案背後的原理其實皆大同小異。
GNSS/INS緊密結合設計架構在智慧型手機、汽車導航上的貢獻,就是提供比傳統全球衛星定位系統(GPS)接收機更佳的精確度和可靠度,特別是在航位角的改善上,可大幅降低後級的地圖匹配錯誤率,意味著設備將具備較低的誤導航錯誤預警(False Alarm)頻率,進一步提升使用者體驗。