













融合多重汽車環境感知能力 ADAS打造安全駕駛環境
試想當汽車行駛在郊區公路上,忽然有人或動物從路邊跑出來時,一般狀況下駕駛已來不及放掉油門並把腳移往煞車踏板緊急煞車,但是車子卻自己及時煞住而免掉一場致命的車禍。這種具有高度智慧的汽車已開始進到人們的日常生活中。
汽車電子技術在過去30年裡不斷加速演進,各類車型的動力及操控性能也在這段期間內得到大幅的提升。一些先進的安全控制系統如防鎖死煞車系統(ABS)和電子車身穩定系統(ESC)等也陸續被導入。同時,隨著各種車輛四周環境感測系統的演進,先進駕駛輔助系統(ADAS)也開始快速搶進汽車產業。
根據內政部統計,2013年造成人員傷亡之道路交通事故(A1及A2類)共計二十七萬三千四百四十九件;其中A1類交通事故肇事原因,以駕駛人未注意車前狀態占20.4%名列第一,駕駛人未依規定讓車占12.9%次之,酒醉(後)駕駛失控占12.5%居第三。這三類肇事原因均可歸類為人為疏失,足見如果車輛能在行車途中遇有危險狀況時,適時對駕駛提醒或直接介入以避免車禍發生,將可大量減少因車禍導致的人員傷亡。
降低人為疏失風險 自動煞車技術受矚目
ADAS依據對駕駛的實際影響可區分為兩大類:安全警示系統與主動安全系統。簡單地說,安全警示系統指的是非介入式安全輔助,利用影像顯示、燈號或警示音等方式,讓駕駛可以確實掌握汽車周圍環境,進而協助駕駛避免事故的發生。主動安全系統則是依據汽車周圍環境資訊,在需要時介入行車操控功能,進一步保障乘客與行人的安全。
安全警示系統
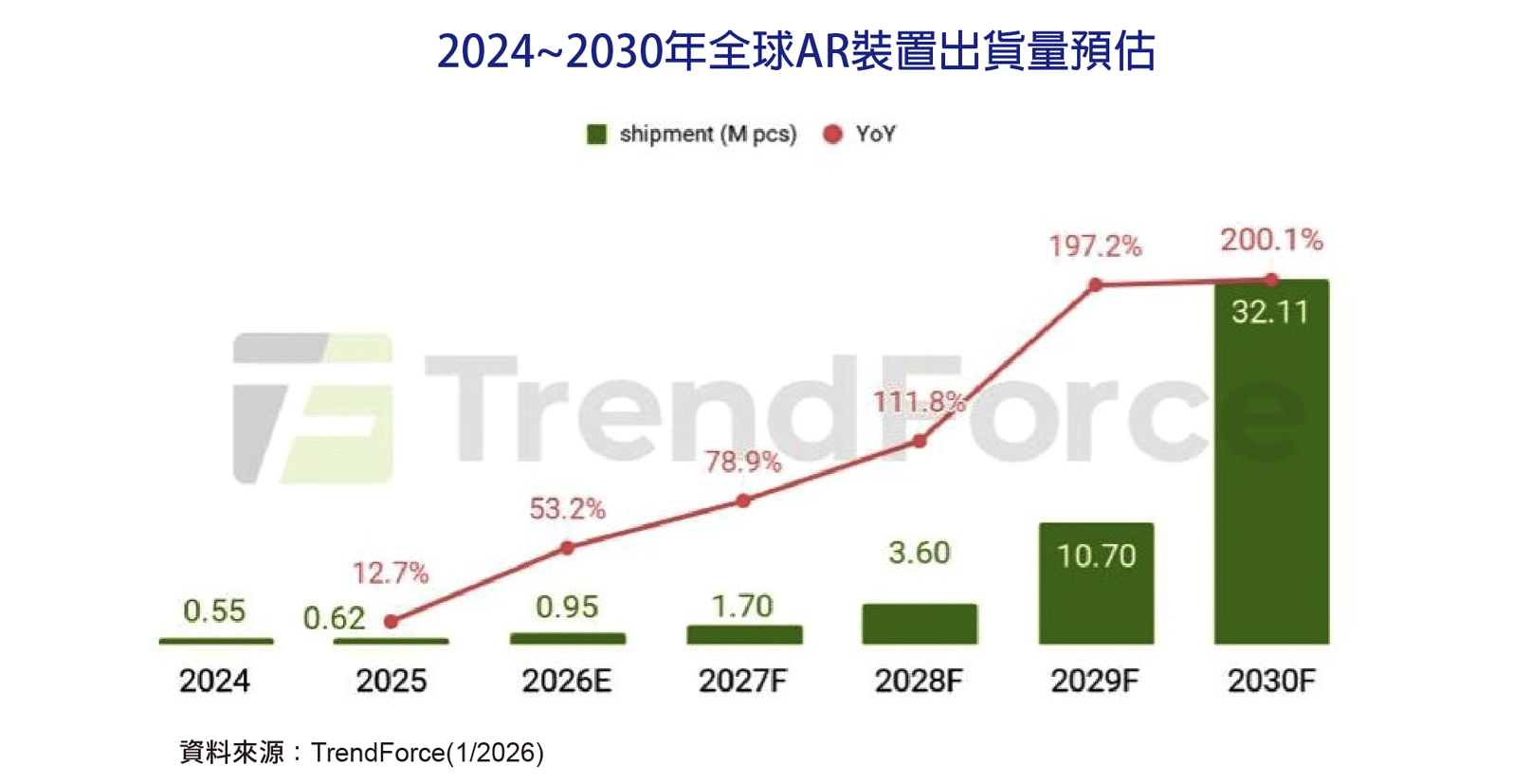
安全警示系統係利用攝影機、雷達(Radar)、光達(LiDAR)、超音波偵測等方式(圖1),將汽車周圍的資訊以多種不同介面有效地提供給駕駛。以影像處理為例,駕駛輔助系統可將倒車影像或環景影像利用車內的顯示器呈現。
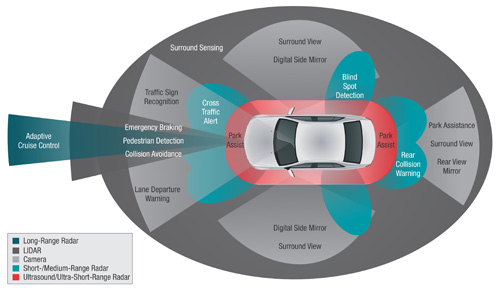 |
| 圖1 汽車周圍環境感測裝置 |
影像處理的進一步應用則是影像辨識,現有技術可對行車周遭的物體如車輛、行人、障礙物與各種交通號誌進行辨識,當有安全疑慮時,系統可藉燈號或警示音提醒駕駛採取必要的防範措施。這一類系統可由下列幾項應用作為代表:車道偏移警示系統(Lane Departure Warning System, LDWS),當車輛太靠近車道線時發出警示音,提醒駕駛將車子拉回車道中央;前方碰撞警示(Front Collision Warning, FCW),當與前車距離小於容易發生碰撞的門檻值時,系統發出警示音提醒駕駛與前車保持安全距離;盲點偵測(Blind Spot Detection, BSD),一般後視鏡都有駕駛看不到的盲區,BSD系統可協助駕駛偵測進入後視鏡盲區的車輛,進而在變換車道前提醒駕駛是否有潛在的危險。
主動安全系統
前述輔助系統都只是將汽車周圍狀況提供給駕駛或啟動警示裝置,並沒有真正介入汽車操控。駕駛輔助的下一個層次,則是藉由電控系統直接協助或修正駕駛對車子的操控。車輛安全電控系統依作動的屬性又可分為主動安全及被動安全兩類,主動安全指的是防範碰撞事故發生所進行的電控系統,而被動安全是指碰撞已無法避免時或碰撞發生後,以減低傷亡為目的而設計的安全功能。
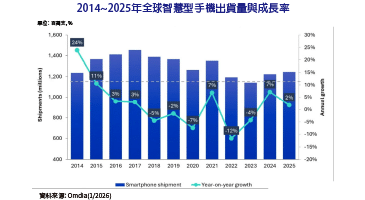
主動安全系統中最廣為人知的莫過於ABS,該系統在預見因煞車過重或摩擦力不足將使車輪產生鎖死打滑時,適時調整煞車壓力以避免車輪因鎖死而失去煞車力。另一種日漸普遍的主動安全系統為ESC,該系統在天雨路滑或高速轉彎時,可藉由各車輪的單獨煞車以避免轉彎不足或過度轉彎(圖2)。
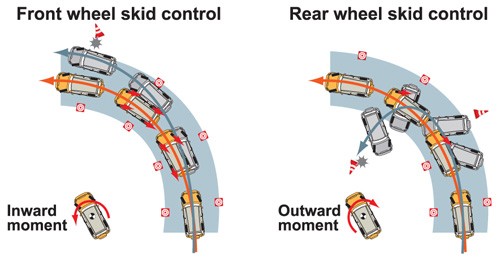 |
| 圖2 ESC系統操作原理 |
ESC技術應用於中心較高的休旅車時還能協助避免車輛翻覆,及防側翻(Roll-Over Mitigation, ROM)。其他常見的系統如車道保持輔助(Lane Keeping Assist, LKA)及自適應巡航控制(ACC)。LKA在車輛有偏離車道傾向而靠近車道線時,系統會自動將車輛往車道中間範圍調整;ACC則是在傳統的自動巡航上,加上與前車保持安全距離的功能。
從2011年起,歐盟開始準備將主動安全加入新車安全評估系統(New Car Assessment Programme, NCAP)。過去Euro NCAP僅就各種碰撞的乘客安全(也就是被動安全)進行一至五顆星的評比,從2014年起,各項主動安全的功能將逐漸加入評比。在主動安全功能中,除了前述的FCW、ESC及ACC等功能外,最關鍵的技術就是自動緊急煞車(Autonomous Emergency Braking, AEB)。
AEB是指在車輛行駛途中,有時因駕駛的分心,有時可能是如打瞌睡等狀況使駕駛暫時失去操控能力,或者是小孩從路邊衝出等突發狀況時,系統會主動在事故發生前將車輛緊急煞住,以確保人車的安全。
AEB的評分分為三個項目進行,即AEB City、AEB Inter-Urban和AEB Pedestrian三種狀況,分別代表城市裡的低速行駛、郊區的高速行駛及行人保護機制;總積分將用三個分數以不同的權重加乘,同時在各個星等的判別都有總分及各分項得分的最低門檻。
實現主動安全效能 感測器可靠度成關鍵
實現主動安全效能 感測器可靠度成關鍵
主動安全功能的有效與否及可靠度,須仰賴汽車配備之感測器是否能提供可信賴的完整資訊。在上述感測器中,攝影機對物體判別如車輛、行人或交通號誌等辨識具有較好的效果,但天候影響也相對明顯;雷達的偵測距離較佳,天候影響也較小,但在物體區分及對靜止物體之判斷能力較差,價格也相對高;雷射雷達大約介於兩者之間,但價格也隨可靠度提高而急速攀升;超音波雷達則以近距離偵測為主。簡單地說,各種感測器的基本技術與使用限制,即是光學、電磁波及聲波的技術與限制。
因為各類感測器都有其限制,良好的環境感測系統須具備兩種以上之感測器,再以感測器融合 (Sensor Fusion)技術做出最佳的判斷;如此一方面可以補足單一感測器的限制,另一方面也可藉由共同感測到的物件相互比對,而提高對偵測結果的信心。因主動安全為高度安全攸關(Safety Critical)的系統,感測器的可靠度是沒有妥協空間的。
有了良好的感測系統後,主動安全系統最關鍵的技術,就屬高度智慧化的車輛動態控制技術了。在設計車輛動態控制系統前,控制工程團隊須對車輛的煞車、懸吊、動力、轉向等系統特性能充分了解,並對各種制動器的特性與效能充分掌握,方能著手進行控制系統的設計。
由於汽車行駛的路面與環境有極大的差異性,各種主動安全系統必須能在不同天候及環境下發揮功能,因此系統的強健性(Robustness)非常關鍵;同時,也因為操作環境的複雜性,繁複的系統調校及大量的測試驗證,都將是系統設計開發過程中無法避免的。
目前眾多的主動安全技術中,除了ESC及LKA有做到轉向控制之外,其餘系統都是以車行方向(縱向)的應用為主,主要原因在於一方面電動輔助轉向系統(Electrical Power Steering, EPS)在普及化上仍有許多成長空間;另一方面,側向行駛輔助功能將巨幅提升整體控制系統的感測及邏輯複雜度,系統穩定性及可靠度會面臨更大的挑戰。
但是,隨著各種控制系統相關元件技術的不斷進步,側向控制的應用將會快速成長。一個典型的應用就是車道變換輔助系統,在高速公路上變換車道經常容易發生事故,如果汽車能確實掌握四方車輛位置及相對速度,自動車道變換技術將指日可待。另一個應用則是自動停車系統,現在市面上已開始販售具備自動停車系統的新車,以後路邊停車或倒車入庫將更為容易。
其他類別的駕駛輔助技術也在快速地發展,例如交通號誌辨識(Traffic Sign Recognition, TSR),利用攝影機畫面的影像辨識,系統能解讀各種路邊的交通號誌,及時提醒駕駛;智慧型限速輔助(Intelligent Speed Assist, ISA),依據速限的辨識,系統可提供駕駛超速警告甚至主動將車速設限;導航即時路況資訊,可即時將到達目的地前的各種路況提供給駕駛參考,或者協助及時變換路徑。
拓展汽車感測範圍 DSRC加速車聯網建構
隨著無線通訊技術的快速發展,未來汽車將會形成一個聯網生態。目前汽車網路較成熟的技術除了3G或長程演進計畫(LTE)等遠端通訊外,短距通訊技術如專用短距離通訊(Dedicated Short Range Communication, DSRC)技術已開始受到歐美等國家之重視,它的普及可讓汽車對汽車(Vehicle to Vehicle, V2V)及汽車對基礎設施(Vehicle to Infrastructure, V2I)變為可能;藉由車對車及車對固定裝置間的局部連結,許多在駕駛視力範圍以外的附近交通資訊,將可在第一時間內互相交換,對行車安全及節能減碳都能帶來實質的效益。
美國高速公路安全局(National Highway Traffic Safety Administration, NHTSA)於2012?2013年在密西根州安那堡市進行了為期半年以上的試運行,由密西根大學主導,各車廠及相關學研單位協辦,於該城市內約三千輛汽車加裝DSRC裝置,以收集該系統對整體交通安全與節能的效益。其結論證明DSRC具有顯著的成效,並計畫在未來兩年內決定是否透過立法強制所有的車輛加裝此設備。
技術/法規逐步到位 智慧車邁向自動駕駛
當各種行車輔助與控制技術都能確實掌握時,下一階段挑戰就是自動駕駛的汽車了。目前已有許多車廠及研究團隊積極發展自動駕駛技術,但距離技術成熟並能商品化仍有很長的時間。
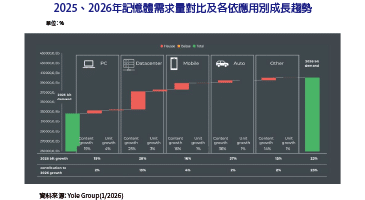
目前最積極的團隊莫過於Google Driverless Car,該車利用64雷射光束組成的雷射雷達,加上攝影機、雷達、全球衛星定位系統(GPS)和超音波雷達等裝置,偵測四周環境及其他移動物體,並經過複雜的感測融合技術以達到最基本自動駕駛之目的(圖3)。Google汽車的配置在市售車款上並不適合,而且成本也不實際;更重要的,一旦發生事故,責任的釐清絕不單純,連帶會影響顧客的接受度。
 |
| 圖3 Google自動駕駛車 |
基於各方對自動駕駛的定義差異甚大,NHTSA於是將自動駕駛技術依自動化的層次區分為五階,讓相關的技術討論能有共識而不會產生誤解。第零階即傳統的汽車,完全沒有介入式的駕駛輔助系統;第一階自動化可有一種以上的介入式輔助系統,但各系統均為獨立運作;第二階自動化具有兩種以上的控制系統共同運作,容許部分時間將部分操控交給控制系統操作,但駕駛仍須全時監視行車狀態,並隨時能將主控權完全接手;第三階自動化駕駛可適時將全車操控交由控制系統處理,但當系統遇有無法操作的情況時,系統會留充裕的時間通知駕駛接管;而第四階才是完全自動駕駛,只要有目的地資訊,車輛會自行開到目的地。
有了清楚的定義後,相關法規才能規範在什麼時間、哪種技術成熟了,再准許相關功能的自動駕駛車輛上路,而且駕駛的責任也可以清楚地定義,因為任何差錯都可能帶來無法預期的災害,責任歸屬必須非常明確。
依上述定義來看,所謂自動駕駛車輛較可行的目標應是在第三階,或許再5?10年可以開始看到該類的商品出售。然而,在技術演進的過程中,基礎建設的投資,車廠與協力廠的積極投入,甚至法規的及時調整都是不可或缺的關鍵因素。
全面掌握路況資訊 ADAS增進駕駛安全
現今各種先進技術已快速且大量地運用在汽車上,以進一步提升舒適性、方便性及各種操控性能,但再怎麼先進的功能都不能凌駕於最基本的行車安全之上。ADAS利用各種先進的電子及電控技術,一方面讓駕駛對汽車的操控有更進一步地掌握,同時也讓各種路況的駕駛更加安全。
每一種主動安全技術的實現,都象徵著人類生命財產多了一層保障,這同時也代表著社會成本的進一步低減,因此全球都已把ADAS相關之技術發展列為最高優先的投資與補助項目之一。希望國內產官學研各界也能跟上這一波浪潮,將相關技術與產品不斷地向上提升,讓國人能進一步享受高科技所帶來的保障。