















2021年8月小米發表CyberDog機器人,一款四足、實驗性、開源的機器人,搭載小米自研高性能伺服馬達,高效能運算與強勁動力,內建超感視覺探知系統和AI語音交互系統,支援多種仿生動作姿態。軟體系統搭載英商科能(Canonical)的Ubuntu開源技術平台,該專案致力於打造一個四足機器人開發平台,透過開放原始碼和開源社群維護的方式,希望可以改善機器人開發環境。
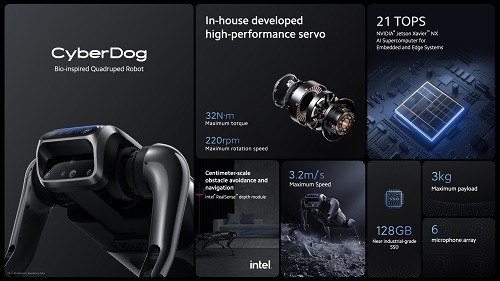
小米自行開發的高性能伺服馬達提供 32 牛頓米最大輸出扭矩、每分鐘220最大轉速以及每秒 3.2 公尺最快行走速度,能保證高扭矩的同時兼具高速性能與靈敏反應。性能支援讓CyberDog能夠完成各類高速運動及後空翻等高難度動作,CyberDog全身擁有11個高精度感測器,可主動探測外部細微變化,包括觸控感測器、鏡頭、超音波感測器、GPS模組等。基於此可衍生更符合生物直覺的交互功能,以及環境感知、分析能力。CyberDog內建的超感視覺探知系統,可實現自主識別跟隨、SLAM建圖和導航避障功能。
而在技術部分,小米透過人形檢測技術和行人重識別(Person Re-identification)技術保障了跟隨功能的穩定,使用人臉識別技術讓 CyberDog 具有寵物化特徵,滿足跟隨主人的場景需求。最終讓它能在室外空曠平整的環境中跟隨主人。借助多個感測器的協作,它可感知當前環境,通過演算法創建導航地圖,並自動規劃到下一目標點的最優路線。在導航及跟隨過程中均能實現自主規避障礙物。
CyberDog的作業系統是Ubuntu 18.04 LTS。小米產品經理認為,開源是CyberDog的核心,它確保了相容性和成長性。十多年來,Ubuntu一直支持機器人社群,為多個開源機器人專案提供了穩定的基礎環境。Ubuntu是 ROS 首選參考的作業系統,原生支援ROS 1和ROS 2發行版,還支援無人機開發人員的軟體堆疊,包括PX4。
CyberDog也受益於Ubuntu的安全設計。從其工具鏈和使用的軟體套件,到產業標準認證和更新機制,英商科能將Ubuntu的安全性和可靠性視為最重要的問題。





