AMR系統整合關卡重重 兼顧電源/通訊/感測
自主移動機器人(AMR)是一種複雜的系統,與自動駕駛汽車有許多共同之處,都需要感測、電機驅動、電源轉換、照明和電池管理。最大的挑戰是將這些子系統,整合到一個終端產品中。由於需要整合來自不同供應商的不同子系統,導致產品設計的挑戰變得更加困難。本文將探討AMR的複雜世界,並考慮選擇由一家解決方案提供商來負責AMR所有關鍵方面的設計,其優勢包括降低設計/整合風險和縮短上市時間。
自動導引車(AGV)主要在室內移動,並按照預先確定的路線行駛,通常使用地面上的線條作為引導。AMR則比AGV複雜得多,能夠在室內和室外自由導航,而不必遵循預定的路線。在這方面,AMR類似於自動駕駛車輛,因為它們必須識別並避開路徑上的障礙物,無論障礙物是靜止的還是移動的。
幾乎所有AMR的核心都是五個主要子系統,分別管理電源、運動、感測、處理和照明(圖1)功能。每個子系統都很複雜,設計起來往往具有挑戰性,同時也是AMR成功運行的基礎。然而,整合往往是最大的挑戰,尤其是從不同供應商採購子系統或主要零組件時。
圖1 典型AMR的關鍵子系統 (圖片來源:安森美)
要使AMR正常運行,子系統之間的資訊流和功率流至關重要,這意謂著要有一個通用的接口,和經過測試可協同工作的零組件,以消除相容性問題。簡單來說,從單一解決方案供應商採購關鍵系統元件有助於降低開發風險,縮短上市時間,並在競爭激烈的市場中保持領先地位。
建立AMR系統整合
感測對於在自由空間中導航的AMR至關重要,尤其是在沒有軌道或其他導航輔助設備可用的情況下。AMR必須能夠找到安全的路線,並處理路徑上的靜態和移動障礙物。為了克服天氣或照明條件的限制,並適應不同的距離,會使用包括影像感測器、超音波和光學雷達(LiDAR)在內的多種技術。來自多個感測器的數據會被整合,以便AMR更好地瞭解周圍環境。這種技術被稱為感測器融合,為AMR提供了更好的可靠性、備援性和安全性。
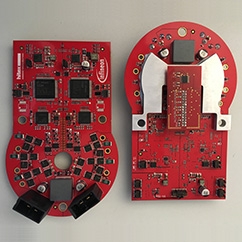
除影像感測器之外,用於測距(LiDAR)的矽光電倍增器(SiPM)、超音波感測器、電感式感測器以及支持到達角(AoA)和出發角(AoD)的Bluetooth低功耗(BLE)技術微控制器,都有助於AMR定位。運動控制在AMR中非常重要,通常使用無刷直流(BLDC)電機,需要複雜的演算法進行精確控制。無刷直流電機驅動需要許多元件來正確控制。產品如NCD83591三相栅極驅動器透過開啟和關閉功率開關來控制換相,非常適合用於電機控制子系統(圖2)。
圖2 驅動BLDC電機需要多個零組件協同工作 (圖片來源:安森美)
MOSFET用作開關為電機繞組供電。中壓(MV)...
》想看更多內容?快來
【免費加入會員】或
【登入會員】,享受更多閱讀文章的權限喔!