AEB力保汽車/行人安全 法案應加快趕上技術進展(2)
美國國家公路交通安全管理局(NHTSA)的自動緊急制動系統(AEB)提案,可能已經落後於最新的汽車解決方案。車用感測器技術在影像辨識的解析度與精準度持續提升,也不斷強化夜間辨識能力。
AEB工作原理
(承前文)如果瞭解AEB系統的工作原理,將有助於正確評估潛在的法規要求。作為先進駕駛輔助系統(ADAS)的主要技術之一,AEB是一種強大的車輛安全措施,可以顯著減少安全事故,特別是在車輛前後碰撞和車輛與行人碰撞的情況下。典型的AEB系統結合影像感測器、雷射光達(LiDAR)和毫米波光達(Radar)來感知可能導致潛在碰撞的物體。
車輛會對影像進行即時分析,如果即將發生碰撞,就會提醒駕駛踩下刹車。如果駕駛未能在足夠的時間內踩下刹車,車輛會主動採取制動措施。對於影像感測器而言,AEB系統需要轉化為視場角(FOV)、解析度、影格率和微光性能等參數要求,這些影像感測器特性將直接影響物體的可探測性和物體探測的延遲。
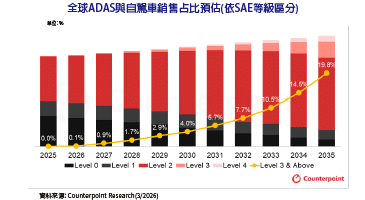
如圖2所示,配備AEB功能的車輛銷售占比大幅增加,但這並不是汽車產業唯一的重大變化。近年來,車輛的底層技術有了長足的發展。處理系統更加強大,通訊系統速度更快、資料傳輸率更高,感測器也變得更加準確,特別是在微光條件下。這些因素共同促使AEB系統變得更加智慧、可靠,使系統能夠在更多種情況下採取可挽救生命的動作。
感測器與AEB比較
產品如安森美的Hyperlux影像感測器系列,旨在幫助汽車整車廠商(OEM)在各種條件下進一步提升車輛的安全性,進而減少事故。如果將感測器系列與NHTSA提案比較,就會發現該法規應該更深入,或者至少可以儘早實施。
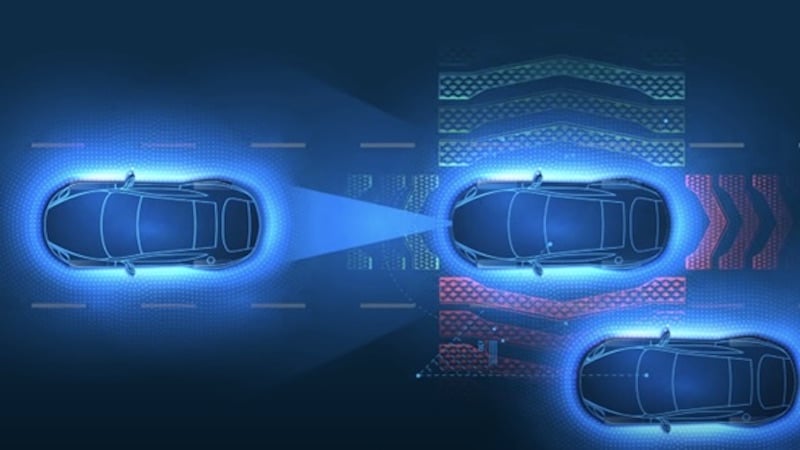
考慮車輛對行人場景中車速最高(因此制動距離最大)的情況:一輛車正在接近一個沿車輛行駛路徑行走的行人。車速可以達到每小時40英里,而行人的步行速度為每小時3.1英里(圖2)。
圖2 行人汽車制動系統測試場景示例——行人沿路徑移動的基本設置
對於此車輛對行人的場景,如果考慮到典型的城市路況,前方ADAS視場角為120°、時速達40英里的車輛的停止(制動)距離、0.5秒至1秒的回應(反應)時間,以及每個行人至少8個圖元才能正確識別,可以推導出大約需要2480圖元的最小(水準)解析度。此感測器的解析度為3840× 2160圖元,滿足了NHTSA要求車輛對行人場景所規定的解析度,可有效地為行人提供多達12個圖元,進而實現強大的AEB識別演算法操作。
新的NHTSA建議新增內容,要求汽車在微光條件下和夜間準確探測行人。上述感測器具有2.1...
》想看更多內容?快來
【免費加入會員】或
【登入會員】,享受更多閱讀文章的權限喔!